Negli ultimi dieci anni, i veicoli a guida automatica (AGV) si sono evoluti da robot rigidi con funzioni limitate a sistemi intelligenti e adattabili, capaci di gestire flussi di materiali complessi. Grazie all’integrazione con l’Industria 4.0, i progressi nelle tecnologie di navigazione hanno reso possibile questa trasformazione, permettendo agli AGV di operare con una precisione, flessibilità e scalabilità senza precedenti.
Dai percorsi fissi all’intelligenza adattiva
Oggi è possibile scegliere tra diverse tecnologie di navigazione per AGV in base all’ambiente operativo, ai requisiti di progetto e al budget disponibile.
Le tecnologie di navigazione basate su infrastrutture fisiche (come nastri magnetici, fili o marcatori riflettenti per la guida laser) sono adatte ad ambienti strutturati e compiti ripetitivi (es. linee di assemblaggio). Tuttavia, le più recenti innovazioni nella triangolazione laser, nella navigazione a caratteristiche naturali (SLAM – Simultaneous Localization and Mapping) e nel LiDAR hanno rivoluzionato l’autonomia degli AGV. Queste tecnologie permettono la navigazione senza percorsi predefiniti, consentendo agli AGV di adattarsi in tempo reale agli ostacoli e di operare in ambienti più dinamici e complessi.
Principali innovazioni tecnologiche
- Guida laser: in passato limitata all’uso indoor, ora i sistemi laser possono essere integrati con tecnologie ibride (es. dGPS) per transizioni fluide tra ambienti interni ed esterni.
- Navigazione naturale: SLAM e LiDAR permettono agli AGV di costruire mappe 3D dell’ambiente, evitando ostacoli e ricalcolando il percorso dinamicamente. Questa tecnologia riduce la dipendenza da infrastrutture fisiche, abbassando i costi di installazione e rendendo possibile l’impiego degli AGV anche in ambienti non strutturati.
- Sistemi ibridi: combinando punti magnetici, GPS e sensori inerziali, gli AGV ibridi si rivelano particolarmente efficaci in ambienti misti. Ad esempio, nei piazzali esterni si utilizza il GPS per una copertura ampia, mentre negli ambienti interni si usano marcatori magnetici per una maggiore precisione.
- Integrazione con AI e IoT: oggi, gli AGV sfruttano la manutenzione predittiva, l’analisi dei dati in tempo reale e la connettività IoT per ottimizzare i flussi di lavoro. I sensori, ad esempio, monitorano lo stato delle batterie e il traffico, contribuendo a ridurre i tempi di inattività.
La navigazione AGV si è evoluta da sistemi rigidi e vincolati all’infrastruttura a soluzioni intelligenti e adattive. Combinando la precisione del laser, la flessibilità dello SLAM e la scalabilità dei sistemi ibridi, gli AGV moderni stanno rivoluzionando la movimentazione dei materiali in vari settori.
VALUTAZIONE E ANALISI
La scelta della tecnologia di navigazione AGV più adatta richiede un equilibrio tra fattori quali:
- costo del veicolo,
- costo di installazione,
- costo delle modifiche future,
- accuratezza, affidabilità, adattabilità e scalabilità.
Segue un’analisi dei punti di forza e delle criticità delle diverse tecnologie — induttiva, ottica, naturale, GPS, tag/transponder e triangolazione laser — per ottimizzare i flussi di movimentazione di carichi pesanti.
1. GUIDA INDUTTIVA (FILO)
Come funziona: gli AGV seguono fili integrati nel pavimento, comunicando tramite segnali radio.
Prestazioni indoor:
- Vantaggi:
- Immunità a polvere, fumo e variazioni di luce, ideale per ambienti di produzione.
- Buona precisione (±5 mm) per compiti ripetitivi e pesanti (es. carichi oltre 200 ton).
- Svantaggi:
- Percorsi rigidi; ogni modifica richiede interventi infrastrutturali.
- Scalabilità limitata in flotte multi-AGV a causa dei percorsi fissi.
Prestazioni outdoor:
- Raramente applicabile a causa della vulnerabilità dei cavi agli agenti atmosferici e al traffico pesante.
Analisi dei costi:
- Costo iniziale: medio.
- Modifiche: costose (scavi, tempi di fermo).
Adatto per flotte multi-AGV?:
- Ottimale per percorsi strutturati ad alta capacità e pochi cambi.
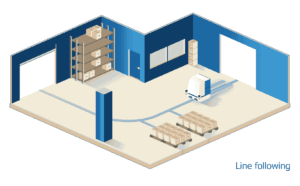
2. GUIDA OTTICA (LINEA/NASTRO)
Come funziona: gli AGV seguono linee dipinte, nastro magnetico o marcatori adesivi.
Prestazioni indoor:
- Vantaggi:
- Basso costo iniziale.
- Installazione semplice (senza scavi).
- Svantaggi:
- Usura frequente; richiede sostituzioni periodiche.
- Precisione moderata (±10 mm), sensibile a sporco o detriti.
Prestazioni outdoor:
- Sconsigliato per danni da agenti atmosferici.
Analisi dei costi:
- Costo iniziale: basso.
- Modifiche: elevate (aggiustamenti manuali e fermi macchina).
Adatto per flotte multi-AGV?:
- Rischi di congestione; adatto a piccole flotte.
3. NAVIGAZIONE NATURALE (SLAM/LIDAR)
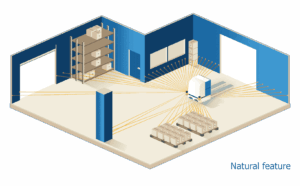
Come funziona: gli AGV mappano l’ambiente usando LiDAR, telecamere o algoritmi SLAM.
Prestazioni indoor/outdoor:
- Vantaggi:
- Nessuna infrastruttura necessaria.
- Evita ostacoli e ricalcola il percorso.
- Scalabile in ambienti dinamici con più AGV.
- Svantaggi:
- Precisione moderata (±10 mm).
Analisi dei costi:
- Costo iniziale: medio.
- Modifiche: basse (aggiornamenti software).
Adatto per flotte multi-AGV?:
- Ideale in layout flessibili in evoluzione.
4. GPS (IBRIDO CON dGPS)
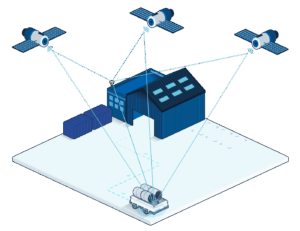
Come funziona: combina GPS e sensori inerziali per esclusiva navigazione outdoor.
Prestazioni outdoor:
- Vantaggi:
- Copertura ampia (porti, piazzali).
- Percorsi virtuali con costi di modifica bassi.
- Svantaggi:
- Precisione scarsa (±100 mm); interferenze indoor.
- Affidabilità limitata in zone a segnale debole o dense.
Analisi dei costi:
- Costo iniziale: alto (sensori complessi).
- Modifiche: basse.
Adatto per flotte multi-AGV:
- Efficiente per flotte outdoor su percorsi semplici.
5. TRIANGOLAZIONE LASER
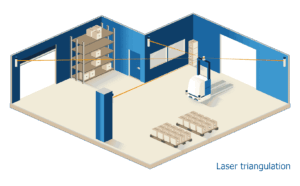
Come funziona: gli AGV utilizzano scanner laser e riflettori a soffitto o parete.
Prestazioni indoor:
- Vantaggi:
- Buona precisione (±5 mm).
- Gestione centralizzata del traffico per flotte multi-AGV.
- Svantaggi:
- Installazione dei riflettori costosa e complessa.
- Sensibilità agli ostacoli che oscurano i riflettori.
Prestazioni outdoor:
- Limitata ad aree coperte (es. banchine coperte).
Analisi dei costi:
- Costo iniziale: alto.
- Modifiche: medie (software + spostamento riflettori).
Adatto per flotte multi-AGV:
- Ottimo per operazioni ad alta precisione (es. carrelli elevatori automatizzati).
TABELLA DI CONFRONTO DELLE TECNOLOGIE
| Fattore | Induttiva | Ottica | Naturale | GPS | Laser |
| Precisione indoor | Buona | Media | Media | Bassa | Buona |
| Uso outdoor | Medio | Scarso | Buono | Ottimo | Scarso |
| Costo iniziale | $$$ | $ | $ | $$ | $$$ |
| Costo modifiche | $$$ | $$ | $ | $ | $$ |
| Adatto per multi-AGV | Basso | Basso | Alto | Medio | Alto |
Navigazione AGV: ogni scenario ha la sua soluzione
In conclusione:
- Usa sistemi induttivi o laser per compiti ad alta precisione.
- Scegli la navigazione naturale per la massima adattabilità.
- Utilizza GPS o tag per operazioni esterne su larga scala.
- Dai priorità a tecnologie aggiornabili via software (es. SLAM) per garantire l’evoluzione futura del sistema.
I team di progettazione Morello sono disponibili per supportarti nella scelta della tecnologia di navigazione più adatta e nella progettazione dell’hardware più idoneo per raggiungere i tuoi obiettivi aziendali.
La tecnologia o la combinazione di tecnologie più adatta verrà proposta dal team tecnico Morello in base ai requisiti del tuo impianto, tenendo conto di fattori quali precisione, affidabilità, ambiente operativo e budget disponibile.